Transforming Drone
This semester-long project involved designing and building a fully custom 3D-printed transforming drone, engineered to transition seamlessly between a driving and flying configuration. Inspired by Caltech’s M4 Morphobot, I developed innovative mechanisms and material selections to achieve a compact and versatile design.
The project required extensive 3D modeling, iterative prototyping, and rigorous testing to refine the drone’s structural integrity and dynamic performance in both modes. By leveraging CAD software, engineering simulations, and hands-on fabrication, I tackled key challenges such as weight distribution, aerodynamics, and mechanical reliability.
Through this experience, I strengthened my expertise in mechatronics, multi-mode system design, and rapid prototyping. This project underscores my ability to merge creativity with technical precision, a skill set crucial for developing advanced robotic and aerial systems.


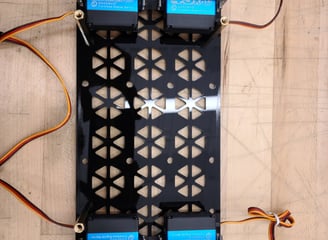
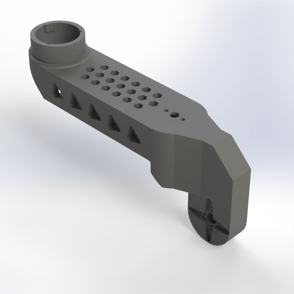
Topology Study
The geometry of the arm was adjusted based on the results of the study in order to reduce its weight
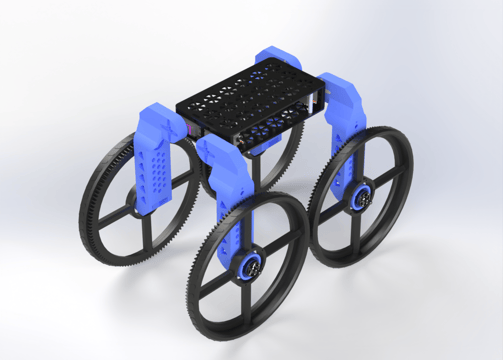
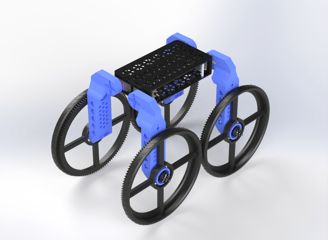
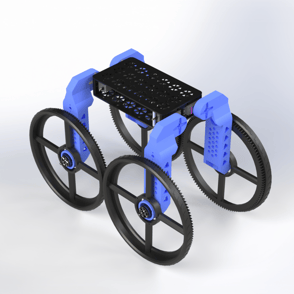
Drive mode
Render of drone in driving configuration accomplished by the attached high torque servos
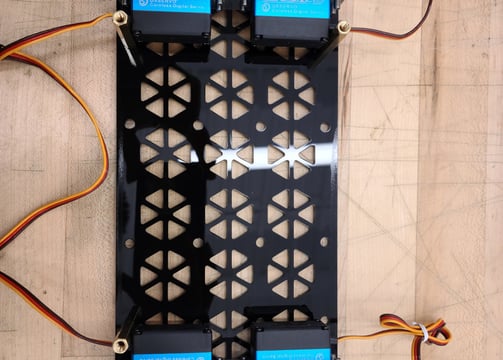
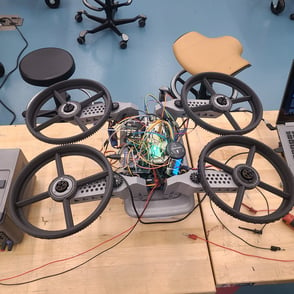
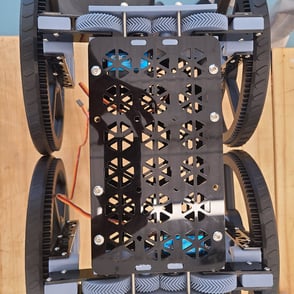
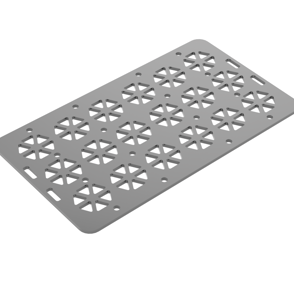
Drone body
Body plate cut out of 3mm black acrylic used to house the main electrical components needed to operate
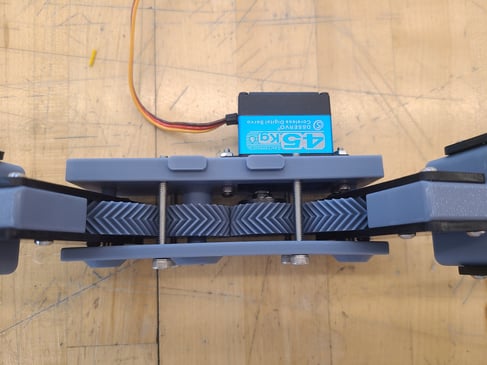
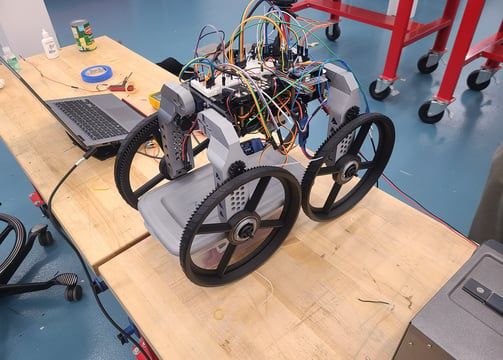
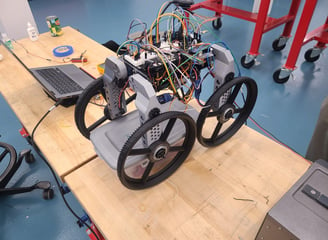
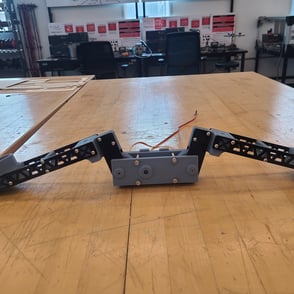
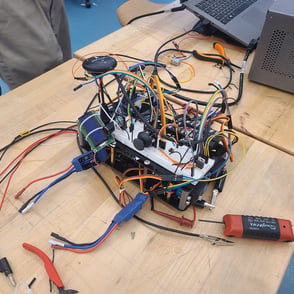
Drive mode test
Once the components had been printed and assembled the electronics were attached for a first test switching between flight and drive modes



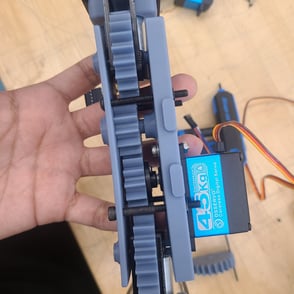
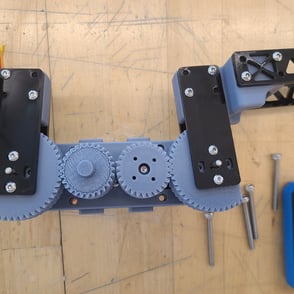

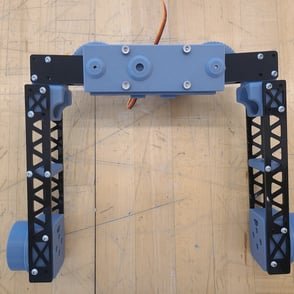






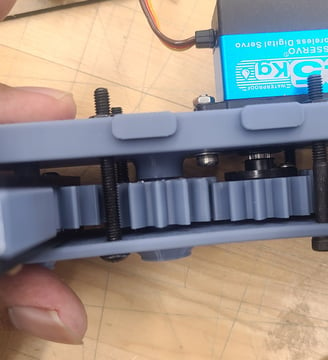
The gearbox was redesigned to use herringbone gears instead of spur gears. It addressed the backlash issues and also increased the contact area between teeth
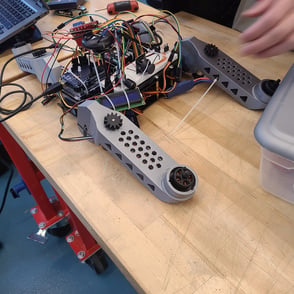
This was the first attempt at redesigning the arm mechanism to only use one servo per side. The first version used spur gears but the tolerance and backlash were too great
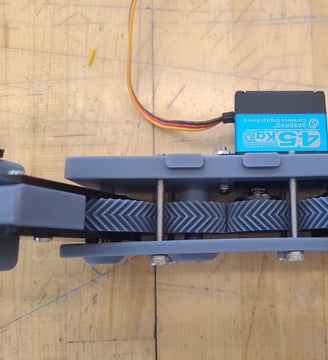
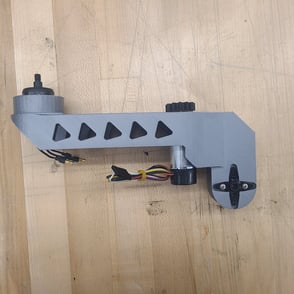
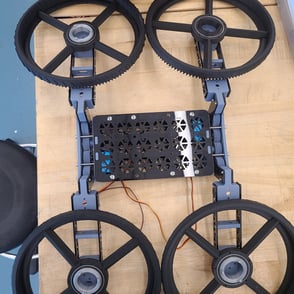
Redesigned Arms V2
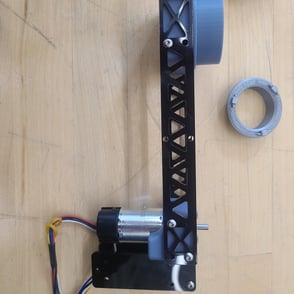
Redesigned Arm V3